Edoardo Barbieri
on 25 August 2025
In sectors where precision and predictability are non-negotiable, timing is everything. Whether coordinating robotic arms on a factory floor, maintaining ultra-reliable latency in telecom networks, or ensuring an automotive braking system responds instantly, the success of these systems depends on meeting strict timing deadlines.
This is the domain of real-time computing, where the operating system (OS) must guarantee that critical tasks run exactly when needed, without delay or uncertainty – and real-time Linux is increasingly emerging as a leading solution in these scenarios.
Let’s explore the basics of a real-time OS, and why it’s essential across industries that depend on absolute reliability and split-second performance. Then we’ll take an in depth look at the use of real-time Linux in the manufacturing, telecommunications, and automotive industries.
Is real-time Linux suitable for industrial use cases?
The ability to execute time-critical tasks with precision and predictability is essential in systems where meeting timing constraints determines overall success. A real-time capable operating system is designed to respond to events as they occur, striving for deterministic response times so that critical tasks are completed within defined deadlines, with minimal jitter and delay.
A hard Real-Time Operating System (RTOS) is purpose-built to meet the stringent timing requirements of embedded systems, industrial automation, automotive control, medical devices, aerospace, and other domains where missing a deadline is considered a system failure. RTOSs provide deterministic task scheduling, fine-grained resource management, and predictable interrupt handling. Many RTOS products undergo rigorous qualification and certification, enabling deployment in safety-critical environments with extremely tight timing budgets and reliability requirements.
However, RTOSs are typically specialized and limited in scope. Their small footprint, static configuration, and narrowly focused APIs make them highly efficient for specific control applications but less suited for scenarios requiring diverse software stacks, complex networking, or user-facing applications.
By contrast, the Linux ecosystem offers a rich set of features, mature driver support, advanced debugging tools, and broad hardware compatibility, attributes that reduce development time from specification to production. Historically, Linux was avoided for real-time workloads due to non-deterministic scheduling and unbounded kernel latencies. This changed with the introduction of the PREEMPT_RT patch set, which systematically reduces worst-case latencies by making nearly all kernel code preemptible, improving interrupt response, and implementing priority-based scheduling. Since Linux kernel v6.12, PREEMPT_RT is maintained as part of the mainline kernel, with 6.12-rt being the latest stable real-time release. While Linux with PREEMPT_RT does not transform Linux into a hard RTOS, it adapts a general-purpose OS to meet many soft and firm real-time requirements. In practice, a PREEMPT_RT-enabled real-time Linux system can achieve latencies low enough for a wide range of industrial, telecom, and automotive applications, without the constraints of dedicated RTOS environments or specialized hardware.
Now that we understand the basics, what are real-time OS examples and use cases across the industry? Let’s find out.
How is a real-time OS used in industry?
Whether it’s powering industrial automation, ensuring ultra-low latency in telecommunications, or enabling safety-critical systems in healthcare and transportation, real-time capable OSes are a key component in any real-time hardware and software stack. These OSes are designed to meet strict timing and responsiveness requirements across a wide range of industries, from energy, oil and gas, and manufacturing and to automotive, aviation, and medical systems. Wherever precision, reliability, and split-second decisions matter, real-time computing is essential.
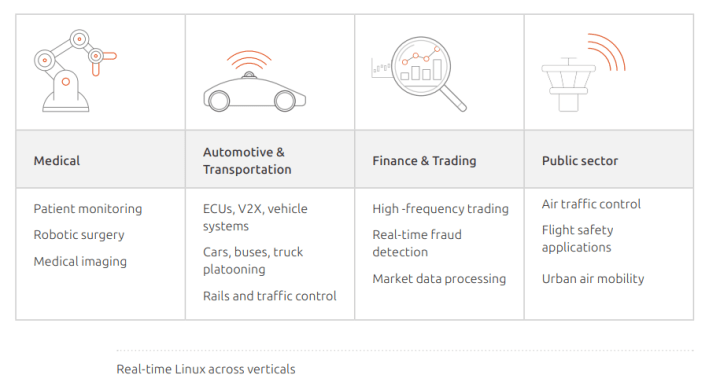
Modern workloads increasingly demand precision timing. Whilst real-time is used across industries in many different ways, some specific examples include:
Manufacturing
In modern manufacturing and process control environments, real-time operating systems are increasingly deployed alongside or within industrial PCs (IPCs) to handle tasks that historically required dedicated hardware. Traditionally, IPCs were used for non-time-critical workloads, such as human–machine interfaces (HMIs), SCADA front-ends, and data acquisition, while real-time control was delegated to dedicated Programmable Logic Controllers (PLCs) or embedded controllers. The lack of deterministic scheduling in general-purpose OSes limited IPCs’ role in direct machine or process control.
With the PREEMPT_RT patch set, Linux can achieve bounded latency and deterministic task scheduling, enabling IPCs to meet real-time constraints. This has fueled a shift toward consolidating workloads, combining HMI, analytics, and control functions on a single, high-performance, real-time capable IPC platform. On the factory floor, deterministic behaviour and low-latency real-time response are essential. PLCs, CNC controllers, and vision systems for defect detection must exchange and process data within fixed cycle times, often in the sub-millisecond range, to maintain system stability and product quality. Missing a control cycle can halt production lines, damage equipment, or compromise safety.
Historically, industrial control networks relied on proprietary fieldbus protocols like PROFIBUS and Modbus RTU with isolated, purpose-built topologies. While these systems provided predictable timing, they limited interoperability and hindered higher-level data integration. Modern deployments are moving toward Ethernet-based, time-sensitive networking (TSN) protocols, which require both deterministic network handling and real-time OS support.
Real-time Linux bridges the gap between legacy, closed-fieldbus systems and modern, open, IT-integrated architectures. It enables industrial systems to adopt open-source software, leverage standard hardware, and still meet strict timing requirements. In particular, Real-time Ubuntu 22.04 LTS supports IEEE 802.1 TSN on Intel Atom and Core processors. At the foundation of TSN is precise time synchronization, ensuring that all devices in the network, from sensors and actuators to controllers, share a common notion of time with sub-microsecond accuracy. This enables time-aware traffic shaping, where frames for control and automation are transmitted at exactly scheduled intervals, avoiding jitter and guaranteeing delivery within bounded latency. TSN also enhances reliability through mechanisms such as frame replication and elimination for fault tolerance, and by isolating or protecting against misbehaving devices to maintain network integrity. Additionally, TSN supports automated device and application configuration, often using Software-Defined Networking (SDN) principles, to streamline deployment and reconfiguration in complex industrial environments.
Telecommunications
In the telecom sector, ultra-low latency, predictable performance, and secure handling of real-time data are critical for both service quality and infrastructure reliability. The shift toward virtualized Radio Access Network (vRAN) architectures in 4G and 5G enables operators to disaggregate hardware from network functions, thereby improving scalability, flexibility, and resource utilization. Traditional RAN deployments, with dedicated hardware for baseband processing, offer deterministic performance but lack the agility of virtualized solutions. By combining vRAN with a real-time capable Linux kernel, operators can achieve deterministic scheduling and bounded latency on commercial off-the-shelf hardware, enabling cost-effective yet high-performance deployments.
OpenRAN further accelerates this transformation by introducing open interfaces and a vendor-neutral ecosystem. In virtualized OpenRAN environments, real-time Linux ensures that time-critical functions like Layer 1 baseband processing and fronthaul scheduling meet stringent latency budgets, often on the order of tens of microseconds. This capability is key for 5G workloads, where scheduling windows and symbol processing times are extremely tight.
Among the alternatives available to telecom operators, Intel’s FlexRAN reference software stack exemplifies this approach, providing a cloud-native vRAN implementation optimized for Xeon processors and acceleration technologies.
Running FlexRAN on Real-Time Ubuntu 22.04 LTS delivers additional performance gains by pairing upstream Kubernetes and automation frameworks with the latest real-time kernel, tuned specifically for telecom workloads. This combination enables Communications Service Providers to modernize their RAN with open-source tools while maintaining the deterministic performance required for carrier-grade deployments.
Explore the architecture for FlexRAN on Real-Time Ubuntu 22.04 LTS, co-validated with Intel.
Automotive
Automotive systems increasingly demand both deterministic real-time performance and the flexibility of a full-featured operating system. Real-time requirements appear across a wide spectrum, from safety-critical control loops in braking and steering systems to latency-sensitive communications in Vehicle-to-Everything (V2X) networking, and coordination in truck platooning or rail traffic control. In these contexts, a missed deadline could result in degraded performance or even catastrophic safety failures.
Traditionally, these hard real-time constraints have been met with dedicated RTOSs, which provide minimal, deterministic kernels for Electronic Control Units (ECUs). RTOSs remain the right choice for deeply embedded, safety-certified workloads where microsecond-level response times and deterministic interrupt handling are essential, such as brake-by-wire systems, engine control, or airbag deployment.
However, the shift toward software-defined vehicles (SDVs) is driving the consolidation of functionality onto higher-performance domain controllers capable of running mixed workloads. For example, a central compute unit may run Advanced Driver Assistance Systems (ADAS) perception stacks, infotainment, connectivity services, and even over-the-air update frameworks alongside time-critical control applications. In such scenarios, a real-time capable general-purpose OS provides the determinism needed for some control functions while enabling a rich application ecosystem, containerized workloads, advanced networking stacks, and standard software development toolchains. The combination of real-time Linux and containerization platforms like Kubernetes allows OEMs and Tier 1 suppliers to update, extend, and secure vehicle software over the vehicle’s lifetime, something that is difficult to achieve with traditional RTOS-only architectures.
Within the broad automotive realm, real-time Linux is finding adoption in infotainment and HMIs by integrating multimedia, navigation, and voice control without disrupting deterministic tasks. On the vehicle itself, a real-time OS can enable sensor fusion and decision-making in ECUs that also communicate with cloud services for predictive maintenance or fleet optimization. Similarly, V2X communications support IEEE 802.11p or 5G C-V2X message handling within strict latency bounds for collision avoidance or traffic coordination. Outside of the vehicle, further applications include running centralized, Linux-based control systems with deterministic scheduling for signalling and routing logic in the context of rail and traffic control operations.
Canonical’s automotive work with Real-Time Ubuntu offers a long-term-supported Linux distribution with a tuned PREEMPT_RT kernel, enabling manufacturers to build SDVs that merge safety, performance, and innovation on a single platform.
Watch our webinar to learn more about real-time Linux in automotive.
Getting started with real-time Linux
With PREEMPT_RT now part of mainline Linux, can device manufacturers get their hands on it and deploy to production? Not so fast.
When selecting a real-time capable OS, professional support is often underestimated. With ongoing vulnerabilities and frequent exploits, developers must be mindful of the risks in relying solely on community-maintained open-source projects. While vulnerability scanning is essential, enterprises cannot depend entirely on individual contributors. Reliable and well-tested security updates are critical.
For device makers, telecom operators, and industrial enterprises, maintaining their own real-time OS requires significant in-house expertise, which becomes even more difficult for products with long lifecycles. Faulty updates can jeopardise system stability, making a service-level agreement with a commercial provider a safer option.
Real-time Ubuntu, for example, delivers a production-grade distribution backed by 10+ years of security maintenance and support. Canonical’s engineering teams manage all Ubuntu kernels and variants, applying and testing critical patches for Linux kernel CVEs through rigorous processes. This approach ensures high reliability by combining careful design, skilled maintenance, and broad deployment experience.
While extensive work went into engineering Real-time Ubuntu for cutting-edge performance across use cases and verticals, the great news is you can run Real-time Ubuntu on your workstation in just a couple of steps.
Further Reading
A CTO’s guide to real-time Linux
Is a real-time OS right for your business?
Cyber Resilience Act: Yocto or Ubuntu Core for embedded devices?